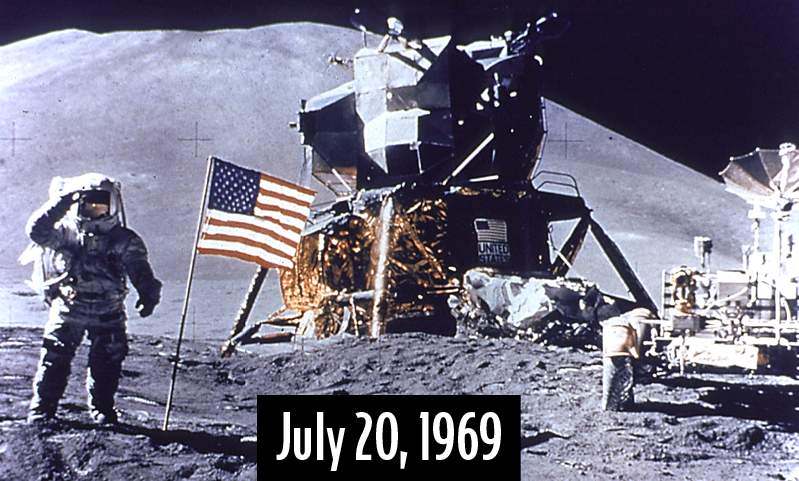
20 lipca 1969 człowiek stanął na powierzchni Księżyca.
Zapoczątkowany niecałe dziesięć lat wcześniej przez
prezydenta Kennedy'ego program Apollo znalazł swoje uwieńczenie.
Przez jedną dekadę osiągnięto cel, który wydawał się równie
nieosiągalny jak gwiazdy na niebie. W roku 1961, gdy zapadła
 decyzja o rozpoczęciu realizacji prgramu Apollo, naukowcy nie
mieli bladego pojęcia jak tego dokonać. NASA miała dopiero
trzy lata, amerykanie nie dysponowali technologią zdolną wynieść
człowieka na orbitę, a co dopiero na Księżyc.
decyzja o rozpoczęciu realizacji prgramu Apollo, naukowcy nie
mieli bladego pojęcia jak tego dokonać. NASA miała dopiero
trzy lata, amerykanie nie dysponowali technologią zdolną wynieść
człowieka na orbitę, a co dopiero na Księżyc.
Zasoby finansowe i ludzkie włożone w realizację programu
Apollo były imponujące, nic zatem dziwnego że zakończył się
on sukcesem po stosunkowo krótkim okresie przygotowań. Aby umożliwić
kosmonautom dolecenie na Srebrny Glob i bezpieczny powrót na
Ziemię naukowcy musieli wynaleźć szereg zupełnie dotąd
 nieznanych urządzeń i materiałów. Bardzo wiele przedmiotów
codziennego użytku ma swój początek w badaniach NASA z lat 60-69.
Podam tu tylko kilka przykładów, lecz cała lista jest znacznie,
znacznie dłuższa. Teflon używany obecnie chociażby do
pokrywania patelni został wynaleziony jako powłoka ochronna dla
statku Apollo i miał za zadanie chronić go przed wysoką
temperaturą przy przechodzeniu przez atmosferę ziemską. Dzięki
opracowaniu nowych technik łączności niedługo po zakończeniu
lotów księżycowych możliwe stało się stworzenie globalnej
sieci telefonii komórkowej. Nawet niektóre rzeczy tak
prozaiczne jak rzepy przy butach zostały stworzone na potrzeby
pierwszych kosmonautów. Niezliczona ilość drobnych wynalazków
złożyła się na sukces pierwszego lotu na Księżyc.
nieznanych urządzeń i materiałów. Bardzo wiele przedmiotów
codziennego użytku ma swój początek w badaniach NASA z lat 60-69.
Podam tu tylko kilka przykładów, lecz cała lista jest znacznie,
znacznie dłuższa. Teflon używany obecnie chociażby do
pokrywania patelni został wynaleziony jako powłoka ochronna dla
statku Apollo i miał za zadanie chronić go przed wysoką
temperaturą przy przechodzeniu przez atmosferę ziemską. Dzięki
opracowaniu nowych technik łączności niedługo po zakończeniu
lotów księżycowych możliwe stało się stworzenie globalnej
sieci telefonii komórkowej. Nawet niektóre rzeczy tak
prozaiczne jak rzepy przy butach zostały stworzone na potrzeby
pierwszych kosmonautów. Niezliczona ilość drobnych wynalazków
złożyła się na sukces pierwszego lotu na Księżyc.
Najważniejszy jednak był gwałtowny postęp elektroniki pokładowej,
a w szczególności komputerów. Ze względu na ograniczoną siłę
nośną rakiet używanych przy lotach Apollo, masa, którą można
było wynieść na orbitę i dalej była stosunkowo mała. A
przecież wtedy komputery zajmowały czasami po kilka pięter i
były, według naszych standartów, żałośnie mało wydajne.
 Koniecznością stało się zbudowanie komputerów mniejszych,
wydajniejszych i pobierających mniej prądu. Ta ostatnia kwestia
była szczególnie ważna, gdyż nagły zanik energii
elektrycznej oznaczałby pewną śmierć dla załogi, o czym o mały
włos przekonaliby się kosmonauci z Apollo 13. Komputer pokładowy
Apollo 11 miał rozmiary zbliżone do dzisiejszego Craya, zaś
jego moc obliczeniowa była niewiele większa od dzisiejszych
kalkulatorów. Pomimo tej prymitywnej techniki ludziom udało się
dolecieć na Księżyc. Niedawno obchodziliśmy trzydziestą
rocznicę lotu Apollo 11. Od tego czasu technika poszła do
przodu w ogromnym tempie, a najszybciej rozwinęły się
komputery. Zwykły, przeciętny pecet stojący na biurku ma tysiące
razy większe możliwości niż komputer pokładowy Apollo. Te
same urządzenia, które kiedyś miały rozmiary pokoju i pobierały
olbrzymie ilości energii, dzisiaj mieszczą się na
mikroskopijnej płytce krzemowej.
Koniecznością stało się zbudowanie komputerów mniejszych,
wydajniejszych i pobierających mniej prądu. Ta ostatnia kwestia
była szczególnie ważna, gdyż nagły zanik energii
elektrycznej oznaczałby pewną śmierć dla załogi, o czym o mały
włos przekonaliby się kosmonauci z Apollo 13. Komputer pokładowy
Apollo 11 miał rozmiary zbliżone do dzisiejszego Craya, zaś
jego moc obliczeniowa była niewiele większa od dzisiejszych
kalkulatorów. Pomimo tej prymitywnej techniki ludziom udało się
dolecieć na Księżyc. Niedawno obchodziliśmy trzydziestą
rocznicę lotu Apollo 11. Od tego czasu technika poszła do
przodu w ogromnym tempie, a najszybciej rozwinęły się
komputery. Zwykły, przeciętny pecet stojący na biurku ma tysiące
razy większe możliwości niż komputer pokładowy Apollo. Te
same urządzenia, które kiedyś miały rozmiary pokoju i pobierały
olbrzymie ilości energii, dzisiaj mieszczą się na
mikroskopijnej płytce krzemowej.
Wbrew temu co się powszechnie sądzi, komputery pokładowe wahadłowców
również nie należą (według obecnych standartów) do maszyn
potężnych. Przeciętna elektronika mieszcząca się na przykładowym
promie Discovery stoi na poziomie porządnego komputera ośmiobitowego,
na przykład Amstrada 6128. Po zdemontowaniu lini produkcyjnych
 rakiet Saturn 5, które wykorzystywane były w programie Apollo
amerykanie zajęli się opracowaniem systemu wahadłowych lotów
promów kosmicznych. Pierwsze tego typu maszyny odbyły loty próbne
pod sam koniec lat siedemdziesiątych, na stałe zaś weszły w
poczet urządzeń wykorzystywanych przez NASA w latach
osiemdziesiątych. Nie można zapominać iż w latach 78-82, gdy
powstawały systemy pokładowe wahadłowców, komputery osobiste
znajdowały się jeszcze w powijakach. Pomimo iż komputer pokładowy
Discovery jest znacznie bardziej skomplikowany i ma dużo większe
możliwości niż jego odpowiednik w module załogowym Apollo, w
dalszym ciągu daleko mu do zwykłych komputerów osobistych, z
których korzystamy na codzień. Podobnie zresztą rzecz się ma
z wyposażeniem stacji orbitalnej Mir, której przestarzała
konstrukcja od lat dostarcza Amerykanom tematów do żartów (swoją
drogą śmiać się raczej nie powinni biorąc pod uwagę iż
sami taką stacją nie dysponują).
rakiet Saturn 5, które wykorzystywane były w programie Apollo
amerykanie zajęli się opracowaniem systemu wahadłowych lotów
promów kosmicznych. Pierwsze tego typu maszyny odbyły loty próbne
pod sam koniec lat siedemdziesiątych, na stałe zaś weszły w
poczet urządzeń wykorzystywanych przez NASA w latach
osiemdziesiątych. Nie można zapominać iż w latach 78-82, gdy
powstawały systemy pokładowe wahadłowców, komputery osobiste
znajdowały się jeszcze w powijakach. Pomimo iż komputer pokładowy
Discovery jest znacznie bardziej skomplikowany i ma dużo większe
możliwości niż jego odpowiednik w module załogowym Apollo, w
dalszym ciągu daleko mu do zwykłych komputerów osobistych, z
których korzystamy na codzień. Podobnie zresztą rzecz się ma
z wyposażeniem stacji orbitalnej Mir, której przestarzała
konstrukcja od lat dostarcza Amerykanom tematów do żartów (swoją
drogą śmiać się raczej nie powinni biorąc pod uwagę iż
sami taką stacją nie dysponują).
Zanim przejdę do najnowszych osiągnięć kosmicznego przemysłu
komputerowego, spróbujmy zastanowić się dlaczego właściwie
loty kosmiczne wymagają aż tak dokładnych obliczeń by wymagało
 to komputerów. Mogłoby się wydawać, iż nie ma nic prostszego
niż nawigowanie w pustce kosmosu. Nie ma na co wpaść, nie ma
ruchu z naprzeciwka, idealne wręcz warunki. Ale tak się tylko
wydaje. Piewszą przeszkodą w ręcznym sterowaniu statkiem
kosmicznym staje się jego główna zaleta, czyli prędkość. Pędząc
z prędkością 140,000 kilometrów na godzinę każde,
najmniejsze nawet opóźnienie reakcji może spowodować
tragiczne w skutkach zejście z toru lotu. Komputer natomiast
radzi sobie w tego typu sytuacjach zdecydowanie lepiej, gdyż
czas jego reakcji jest nieporównywalnie mniejszy.
to komputerów. Mogłoby się wydawać, iż nie ma nic prostszego
niż nawigowanie w pustce kosmosu. Nie ma na co wpaść, nie ma
ruchu z naprzeciwka, idealne wręcz warunki. Ale tak się tylko
wydaje. Piewszą przeszkodą w ręcznym sterowaniu statkiem
kosmicznym staje się jego główna zaleta, czyli prędkość. Pędząc
z prędkością 140,000 kilometrów na godzinę każde,
najmniejsze nawet opóźnienie reakcji może spowodować
tragiczne w skutkach zejście z toru lotu. Komputer natomiast
radzi sobie w tego typu sytuacjach zdecydowanie lepiej, gdyż
czas jego reakcji jest nieporównywalnie mniejszy.
Problemem staje się również specyfika sterowania pojazdem
kosmicznym. Wbrew temu co pokazują nam we wszelkich filmidłach
s-f, nikt w kosmosie nie lata na stale włączonych silnikach (może
z pominięciem napędu jonowego). Statek kosmiczny w momencie
startu nabiera prędkości i wchodzi na precyzyjnie wyliczony
kurs. Gdy wyjdzie poza ziemską orbitę, zużyte człony rakiety
są odrzucane. W przestrzeni kosmicznej statek leci z prędkością,
którą osiągnął przy starcie i przeważnie pozostaje na tym
samym kursie przez wiele miesięcy. Manewry korekcyjne są
przeprowadzane jak najrzadziej, gdyż zawsze istnieje ryzyko
usterki, a poza tym każdy manewr zużywa cenne paliwo w
silnikach korekcyjnych. Silniki te są w związku z tym włączane
impulsowo, na bardzo krótkie okresy czasu. I tu właśnie
przydają się ponownie komputery pokładowe. W odróżnieniu od
człowieka, komputer potrafi wyliczyć z dokładnością do
milionowych części sekundy w którym momencie i na jak długo włączyć
ciąg silnika.
Kolejnym delikatnym momentem jest wchodzenie na orbitę docelowej
planety lub innego ciała niebieskiego. Nie można zapominać iż
rozpędzony statek musi jakoś wyhamować. A nie jest to wcale
takie proste, biorąc pod uwagę że tym razem nie ma żadnego
potężnego silnika rakietowego, który byłby w stanie statek
wyhamować. Aby rozwiązać ten problem naukowcy z NASA
opracowali manewr tzw. hamowania atmosferycznego. Polega on na
tym iż statek odpala silniki korekcyjne i wchodzi na bardzo wydłużoną
eliptyczną orbitę wokół planety, po czym powoli, w miarę
obniżania orbity zaczyna zwalniać na skutek tarcia o górne
 warstwy atmosfery, zaś jego orbita staje się coraz bardziej
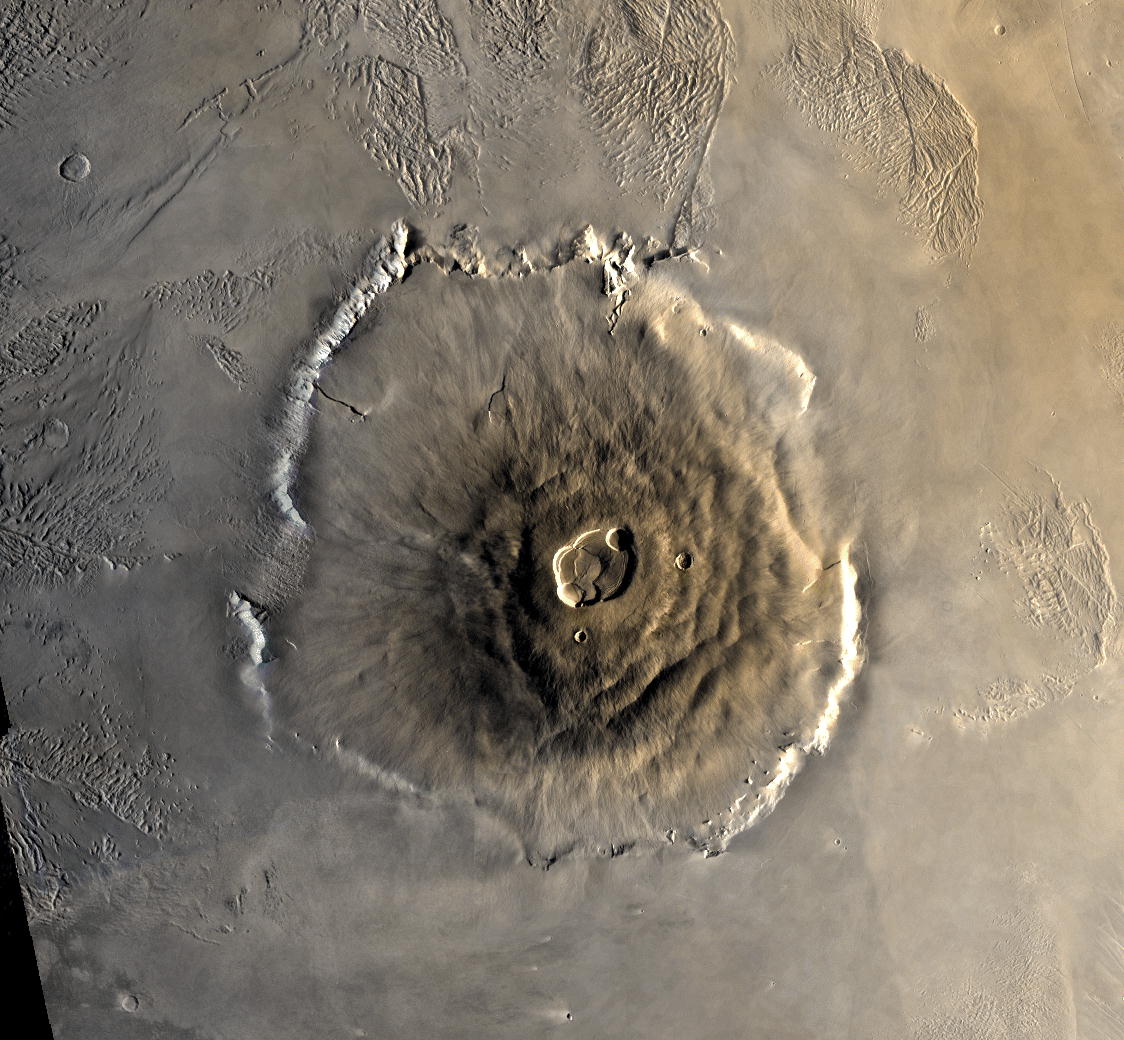
kolista. W ten właśnie sposób na orbicie Marsa umieszczono z
wielką precyzją orbiter Mars Global Surveyor. Aby manewr
hamowania atmosferycznego przeprowadzić jak należy potrzeba
olbrzymiej ilości skomplikowanych obliczeń, które może wykonać
tylko komputer. Jeżeli statek wejdzie w atmosferę zbyt głęboko,
spali się (tak jak feralny Mars Climate Orbiter dwa miesiące
temu). Jeżeli wejdzie zbyt płytko, nie da rady wyhamować.
Skomplikowane obliczenia są również wymagane podczas lądowania
wahadłowców. Korytarz powietrzny wejścia w atmosferę jest tak
wąski, że człowiek nigdy nie poradziłby sobie z utrzymaniem
promu w odpowiedniej płaszczyźnie. Gdyby kula ziemską miała
rozmiary piłki nożnej, korytarz ten miałby grubość kartki
papieru. Poza tym prom musi utrzymać odpowiedni kąt schodzenia
w atmosferę. Zbyt duży kąt wejścia grozi spaleniem, natomiast
przy zbyt małym załoga ryzykuje "odbicie" od
atmosfery tak, jak płaski kamień od bija się od powierzchni
wody i poszybowanie w pustkę kosmosu bez możliwości powrotu.
Jak widać, bez dobrych komputerów pokładowych nie ma co się
wybierać w kosmos.
warstwy atmosfery, zaś jego orbita staje się coraz bardziej
kolista. W ten właśnie sposób na orbicie Marsa umieszczono z
wielką precyzją orbiter Mars Global Surveyor. Aby manewr
hamowania atmosferycznego przeprowadzić jak należy potrzeba
olbrzymiej ilości skomplikowanych obliczeń, które może wykonać
tylko komputer. Jeżeli statek wejdzie w atmosferę zbyt głęboko,
spali się (tak jak feralny Mars Climate Orbiter dwa miesiące
temu). Jeżeli wejdzie zbyt płytko, nie da rady wyhamować.
Skomplikowane obliczenia są również wymagane podczas lądowania
wahadłowców. Korytarz powietrzny wejścia w atmosferę jest tak
wąski, że człowiek nigdy nie poradziłby sobie z utrzymaniem
promu w odpowiedniej płaszczyźnie. Gdyby kula ziemską miała
rozmiary piłki nożnej, korytarz ten miałby grubość kartki
papieru. Poza tym prom musi utrzymać odpowiedni kąt schodzenia
w atmosferę. Zbyt duży kąt wejścia grozi spaleniem, natomiast
przy zbyt małym załoga ryzykuje "odbicie" od
atmosfery tak, jak płaski kamień od bija się od powierzchni
wody i poszybowanie w pustkę kosmosu bez możliwości powrotu.
Jak widać, bez dobrych komputerów pokładowych nie ma co się
wybierać w kosmos.
Wydawałoby się że skoro daliśmy radę dolecieć na Księżyc
korzystając ze stosunkowo prymitywnych urządzeń pokładowych,
nic nie stoi na przeszkodzie by przy użyciu tej samej
technologii dolecieć gdziekolwiek indziej. Tak jednak nie jest.
Pomijając już kwestie większej prędkości nowoczesnych sond (a
więc i konieczności szybszych reakcji urządzeń), główną
przeszkodą staje się odległość. Księżyc jest oddalony od
ziemi o około 400,000 km (w przybliżeniu). Od Marsa dzieli nas
już 400 milionów kilometrów podczas opozycji, a w najlepszym
przypadku 65 milionów podczas koniunkcji. Przy tak znacznych odległościach
opóźnienie sygnału jest tak duże, że niemożliwe staje się
precyzyjne sterowanie pojazdem kosmicznym. Oprogramowanie pokładowe
musi więc być coraz "inteligentniejsze", coraz
bardziej samodzielne i niezależne od ingerencji człowieka. Właśnie
autonomiczne systemy pokładowe powodują iż komputery używane
w nowoczesnych sondach muszą być tak potężne. O ile bowiem
przeliczenie kilku równań, nawet skomplikowanych, nie jest
wielkim wyzwaniem, o tyle stworzenie programu mającego cechy sztucznej
inteligencji wymaga nieporównywalnie większej mocy
obliczeniowej. Aby sonda była w stanie reagować na zaistniałe
na zewnątrz warunki oraz dynamicznie dostosowywać się do
zaistniałej sytuacji, komputer pokładowy musi należeć do
najnowszej generacji. Do tego dochodzi oczywiście większa
liczba różnych, coraz bardziej skomplikowanych urządzeń pokładowych
takich jak kamery, czujniki, spektrometry, mechanika układu pędnego
i wiele, wiele innych. Poniżej zamieściłem krótkie opisy
kilku najświeższych misji, które, mam nadzieję, dobrze
zobrazują skalę dzisiejszych badań kosmosu i technologie używane
w tych badaniach.
GALILEO
Niektórzy nazywają misję Galileo najbardziej pechową misją w
historii bezzałogowych lotów kosmicznych.
Celem było zebranie danych naukowych na temat największej
planety Układu Słonecznego oraz jej księżyców. Prace nad
Galileo przeciągnęły się jednak jeszcze wiele lat. Pierwszy
dotkliwy cios nadszedł w roku 1986, kiedy to prom kosmiczny
Challenger uległ awarii podczas startu i spłonął w atmosferze.
 Po tym wypadku program lotów wahadłowców uległ wstrzymaniu na
trzy lata, ponadto NASA zakazała przewożenia rakiet na paliwo
ciekłe w ładowniach promów kosmicznych. W tej sytuacji cały
plan dostarczenia sondy na orbitę Jowisza legł w gruzach.
Ostatecznie Galileo został wyniesiony na orbitę dopiero w roku
1989. Z braku rakiety nośnej sonda musiała powoli nabierać prędkości
korzystając z asysty grawitacyjnej innych planet w drodze na
Jowisza. Technika ta jest energooszczędna, jednak znacznie wydłuża
czas lotu -- Galileo dotarł do Jowisza w sześć lat po
wystartowaniu z Ziemi. Problemy ze startem i lotem to jednak nie
jedyne, które prześladowały sondę. Wkrótce po rozpoczęciu
misji naukowcy stanęli przed problemem, który postawił pod
znakiem zapytania całą misję. Główna antena nadawcza nie
otworzyła się i nie można było przetransmitować na ziemię
Po tym wypadku program lotów wahadłowców uległ wstrzymaniu na
trzy lata, ponadto NASA zakazała przewożenia rakiet na paliwo
ciekłe w ładowniach promów kosmicznych. W tej sytuacji cały
plan dostarczenia sondy na orbitę Jowisza legł w gruzach.
Ostatecznie Galileo został wyniesiony na orbitę dopiero w roku
1989. Z braku rakiety nośnej sonda musiała powoli nabierać prędkości
korzystając z asysty grawitacyjnej innych planet w drodze na
Jowisza. Technika ta jest energooszczędna, jednak znacznie wydłuża
czas lotu -- Galileo dotarł do Jowisza w sześć lat po
wystartowaniu z Ziemi. Problemy ze startem i lotem to jednak nie
jedyne, które prześladowały sondę. Wkrótce po rozpoczęciu
misji naukowcy stanęli przed problemem, który postawił pod
znakiem zapytania całą misję. Główna antena nadawcza nie
otworzyła się i nie można było przetransmitować na ziemię
 olbrzymich ilości danych zebranych przez sondę. Całe szczęście
naukowcy uwzględnili możliwość zmiany programów obsługujących
urządzenia pokładowe z Ziemi. Oprócz głównej anteny
nadawczej Galileo posiadał mniejszą antenkę, którą po
zmianie oprogramowania pokładowego wykorzystano do transmisji.
Oczywiście strumień danych był znacznie mniejszy niż gdyby użyto
anteny właściwej, ale i tak można mówić o dużym szczęściu.
Ostatnim pechowym wydarzeniem było przypadkowe wykasowanie części
taśmy z nagraniami podczas przelotu koło Callisto, jednego z
księżyców Jowisza. Utracono część cennych danych, tym razem
jednak był to błąd człowieka. Potem misja przebiegała już
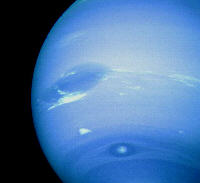
bez większych problemów. Galileo wykonał dokładne pomiary
Jowisza, wykonał też mnóstwo przepięknych zdjęć powierzchni
planety. Jego kamery zwrócone były w kierunku Jowisza gdy
fragmenty komety Shoemaker-Levy bombardowały powierzchnię
olbrzymich ilości danych zebranych przez sondę. Całe szczęście
naukowcy uwzględnili możliwość zmiany programów obsługujących
urządzenia pokładowe z Ziemi. Oprócz głównej anteny
nadawczej Galileo posiadał mniejszą antenkę, którą po
zmianie oprogramowania pokładowego wykorzystano do transmisji.
Oczywiście strumień danych był znacznie mniejszy niż gdyby użyto
anteny właściwej, ale i tak można mówić o dużym szczęściu.
Ostatnim pechowym wydarzeniem było przypadkowe wykasowanie części
taśmy z nagraniami podczas przelotu koło Callisto, jednego z
księżyców Jowisza. Utracono część cennych danych, tym razem
jednak był to błąd człowieka. Potem misja przebiegała już
bez większych problemów. Galileo wykonał dokładne pomiary
Jowisza, wykonał też mnóstwo przepięknych zdjęć powierzchni
planety. Jego kamery zwrócone były w kierunku Jowisza gdy
fragmenty komety Shoemaker-Levy bombardowały powierzchnię
 gazowego giganta. Zdjęcia te są uważane przez astronomów za
jedne z najcenniejszych w historii tej dziedziny nauki, gdyż
przekazują nam bezcenne informacje na temat kosmicznych kolizji
i ich skutków dla planet. Fragmenty komety eksplodowały przy
wejściu w gęstą atmosferę Jowisza wyrzucając do niej
olbrzymie ilości pyłu. Największe z plam, które pojawiły się
na obliczu Jowisza po katastrofie miały średnicę zbliżoną do
średnicy Ziemi... Przelatując obok Jowisza sonda wystrzeliła lądownik,
który z prędkością 170,000 kilometrów na godzinę wszedł w
atmosferę. Po wyhamowaniu do 30,000 km/h otworzyły się
spadochrony, które łagodnie opuściły lądownik w kierunku
dolnych warstw atmosfery. Przez ponad 150 km lądownik zbierał
cenne dane na temat składu chemicznego i warunków panujących w
chmurach pokrywających Jowisza, po czym stopił się w
rozgrzanym do wielkich temperatur wnętrzu planety. Dokonawszy
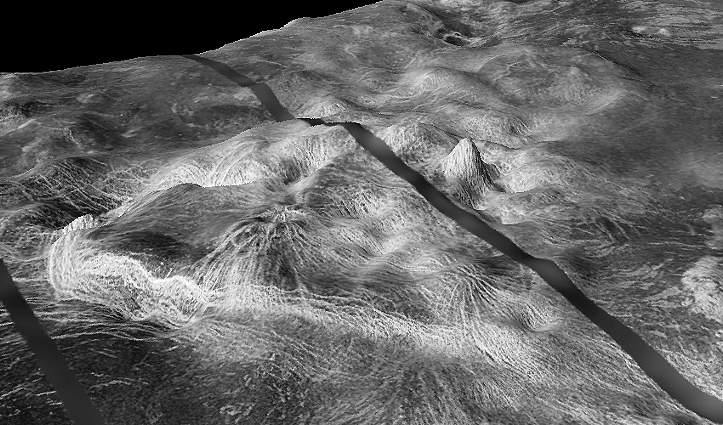
pomiarów Jowisza Galileo skierował swoje szklane oczy w
kierunku jego księżyców. Wykonał kilka przelotów wokół
Callisto, Ganimedesa, Europy oraz Io. Ten ostatni księżyc jest
w centrum uwagi właśnie teraz -- kilka tygodni temu sonda
dokonała niezwykle bliskiego przelotu nad powierzchnią Io i
zrobiła spektakularne zdjęcia wulkanów siarki. Misja Galilwo
trwa nadal, możemy więc spodziewać się kolejnych odkryć lada
dzień.
gazowego giganta. Zdjęcia te są uważane przez astronomów za
jedne z najcenniejszych w historii tej dziedziny nauki, gdyż
przekazują nam bezcenne informacje na temat kosmicznych kolizji
i ich skutków dla planet. Fragmenty komety eksplodowały przy
wejściu w gęstą atmosferę Jowisza wyrzucając do niej
olbrzymie ilości pyłu. Największe z plam, które pojawiły się
na obliczu Jowisza po katastrofie miały średnicę zbliżoną do
średnicy Ziemi... Przelatując obok Jowisza sonda wystrzeliła lądownik,
który z prędkością 170,000 kilometrów na godzinę wszedł w
atmosferę. Po wyhamowaniu do 30,000 km/h otworzyły się
spadochrony, które łagodnie opuściły lądownik w kierunku
dolnych warstw atmosfery. Przez ponad 150 km lądownik zbierał
cenne dane na temat składu chemicznego i warunków panujących w
chmurach pokrywających Jowisza, po czym stopił się w
rozgrzanym do wielkich temperatur wnętrzu planety. Dokonawszy
pomiarów Jowisza Galileo skierował swoje szklane oczy w
kierunku jego księżyców. Wykonał kilka przelotów wokół
Callisto, Ganimedesa, Europy oraz Io. Ten ostatni księżyc jest
w centrum uwagi właśnie teraz -- kilka tygodni temu sonda
dokonała niezwykle bliskiego przelotu nad powierzchnią Io i
zrobiła spektakularne zdjęcia wulkanów siarki. Misja Galilwo
trwa nadal, możemy więc spodziewać się kolejnych odkryć lada
dzień.
http://galileo.jpl.nasa.gov
MARS GLOBAL SURVEYOR, PATHFINDER I SOJOURNER
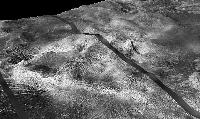
Mars Global Surveyor miał za zadanie wejść na orbitę Marsa i
wykonać szczegółowe mapy powierzchni planety. Wystartował z
 Ziemi w listopadzie 1996 roku, na orbitę Marsa dotarł na wiosnę
1997. Zadanie powiodło się znakomicie pomimo przejściowych
problemów z anteną nadawczo odbiorczą, która nie chciała się
obrócić w kierunku Ziemi. Spowodowało to lekki opóźnienie w
dostarczeniu danych, lecz całe szczęście wszystkie zdjęcia na
Ziemię dotarły. Dzięki MGS wiemy na temat Marsa znacznie więcej
niż jeszcze kilka lat temu. W oparciu o materiały zebrane przez
orbiter będzie można z większą precyzją wyznaczać miejsca
pod przyszłe lądowania. Mars Global Surveyor w dalszym ciągu
działa bez zarzutu i obecnie znajduje się na orbicie kołowej
wokół Marsa. Po zakończeniu głównych celów misji naukowcy
przeprowadzają różne ekperymenty korzystając z aparatury pokładowej.
Ziemi w listopadzie 1996 roku, na orbitę Marsa dotarł na wiosnę
1997. Zadanie powiodło się znakomicie pomimo przejściowych
problemów z anteną nadawczo odbiorczą, która nie chciała się
obrócić w kierunku Ziemi. Spowodowało to lekki opóźnienie w
dostarczeniu danych, lecz całe szczęście wszystkie zdjęcia na
Ziemię dotarły. Dzięki MGS wiemy na temat Marsa znacznie więcej
niż jeszcze kilka lat temu. W oparciu o materiały zebrane przez
orbiter będzie można z większą precyzją wyznaczać miejsca
pod przyszłe lądowania. Mars Global Surveyor w dalszym ciągu
działa bez zarzutu i obecnie znajduje się na orbicie kołowej
wokół Marsa. Po zakończeniu głównych celów misji naukowcy
przeprowadzają różne ekperymenty korzystając z aparatury pokładowej.
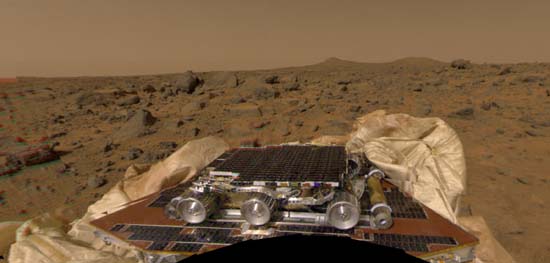
Pathfinder, w odróżnieniu od MGS, był lądownikiem. Wystartował
 w grudniu 1996 a na Czerwonej Planecie wylądował 4 lipca 1997 (ech
to amerykańskie zamiłowanie do dat). Po wejściu w atmosferę i
przejściu przez jej górne warstwy wokół statku rozwinęły się
poduszki powietrzne, które szczelnie go otoczyły. Wielka "piłka
plażowa" odbiła się wielokrotnie od powierzchni planety
zanim znieruchomiała i lądownik mógł wygrzebać się ze środka.
Taka technika lądowania może wydać się amatorska czy wręcz
śmieszna, jednak w rzeczywistości zaoszczędziła
skomplikowanych manewrów hamowania atmosferycznego. Pathfinder
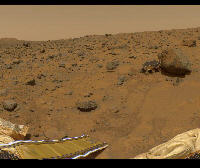
przeżył wstrząsy całkiem dobrze i wkrótce po wylądowaniu
zaczął przekazywać piękne kolorowe panoramy z miejsca lądowania.
Niedługo później z jego wnętrza wyjechał Sojourner, mały
zautomatyzowany pojazd na sześciu kołach, który stał się
symbolem badań Marsa. Malutki srebrny rover jadący powoli po
rdzawym piasku Marsa rozbudził wyobraźnię telewidzów na całym
świecie. Jego zadaniem było zbadanie prawdopodobieństwa występowania
podpowierzchniowych złóż zamarzniętej wody. Sojourner wyposażony
w grudniu 1996 a na Czerwonej Planecie wylądował 4 lipca 1997 (ech
to amerykańskie zamiłowanie do dat). Po wejściu w atmosferę i
przejściu przez jej górne warstwy wokół statku rozwinęły się
poduszki powietrzne, które szczelnie go otoczyły. Wielka "piłka
plażowa" odbiła się wielokrotnie od powierzchni planety
zanim znieruchomiała i lądownik mógł wygrzebać się ze środka.
Taka technika lądowania może wydać się amatorska czy wręcz
śmieszna, jednak w rzeczywistości zaoszczędziła
skomplikowanych manewrów hamowania atmosferycznego. Pathfinder
przeżył wstrząsy całkiem dobrze i wkrótce po wylądowaniu
zaczął przekazywać piękne kolorowe panoramy z miejsca lądowania.
Niedługo później z jego wnętrza wyjechał Sojourner, mały
zautomatyzowany pojazd na sześciu kołach, który stał się
symbolem badań Marsa. Malutki srebrny rover jadący powoli po
rdzawym piasku Marsa rozbudził wyobraźnię telewidzów na całym
świecie. Jego zadaniem było zbadanie prawdopodobieństwa występowania
podpowierzchniowych złóż zamarzniętej wody. Sojourner wyposażony
 był w zaawansowane komputery podobne do tych, jakich używa się
w prototypach robotów na Ziemi. Oprogramowanie pieczołowicie
przygotowane przez naukowców pozwoliło Sojournerowi na sprawne
poruszanie się po powierzchni Marsa i omijanie przeszkód
terenowych bez pomocy z Ziemi (opóźnienie sygnału dochodzi w
tym przypadku do 10 minut, co skutecznie uniemożliwia zdalne
sterowanie). Sojourner zaopatrzony był w zestaw kamer i czujników
za pomocą których badał powierzchię przed sobą. Pomimo iż
elektronika użyta przy jego konstrukcji była bardzo
zaawansowana, komputer pokładowy Sojournera borykał się z tak
dużym napływem danych, że tempo ich analizy pozwalało na
poruszanie z prędkością zaledwie kilku metrów na godzinę.
Obrazuje to znakomicie jak ciężkim zadaniem jest zbudowanie
dobrego komputera pokładowego dla misji kosmicznych nowej
generacji. Sojourner swoje zadanie wykonał, a nawet działał
tydzień dłużej niż zakładano. Niewątpliwie kolejny pojazd,
który wyruszy na powierzchnię Marsa będzie posiadał jeszcze
bardziej rozbudowane systemy autonomicznego podejmowania decyzji.
był w zaawansowane komputery podobne do tych, jakich używa się
w prototypach robotów na Ziemi. Oprogramowanie pieczołowicie
przygotowane przez naukowców pozwoliło Sojournerowi na sprawne
poruszanie się po powierzchni Marsa i omijanie przeszkód
terenowych bez pomocy z Ziemi (opóźnienie sygnału dochodzi w
tym przypadku do 10 minut, co skutecznie uniemożliwia zdalne
sterowanie). Sojourner zaopatrzony był w zestaw kamer i czujników
za pomocą których badał powierzchię przed sobą. Pomimo iż
elektronika użyta przy jego konstrukcji była bardzo
zaawansowana, komputer pokładowy Sojournera borykał się z tak
dużym napływem danych, że tempo ich analizy pozwalało na
poruszanie z prędkością zaledwie kilku metrów na godzinę.
Obrazuje to znakomicie jak ciężkim zadaniem jest zbudowanie
dobrego komputera pokładowego dla misji kosmicznych nowej
generacji. Sojourner swoje zadanie wykonał, a nawet działał
tydzień dłużej niż zakładano. Niewątpliwie kolejny pojazd,
który wyruszy na powierzchnię Marsa będzie posiadał jeszcze
bardziej rozbudowane systemy autonomicznego podejmowania decyzji.
http://mpfwww.jpl.nasa.gov/mgs/index.html
http://mars.jpl.nasa.gov/default.html
DEEP SPACE 1
Jeżeli chodzi o niesioną na pokładzie elektronikę, sonda Deep
Space 1 jest jedną z najciekawszych misji kosmicznych ostatnich
lat. Wystrzelona w zeszłym roku sonda ma za zadanie wykonać
bliski przelot koło asteroidu 1992 KD i dokonać szeregu pomiarów
naukowych. Cele misji nie są może bardzo spektakularne,
zdecydowanie natomiast spektakularną można nazwać aparaturę
testowaną na pokładzie sondy. Deep Space 1 wypróbowuje bowiem
12 nowych technologii, z których dwie najbardziej nowoczesne to
silniki jonowe (przypominam, że słynny TIE Fighter z Gwizednych
 Wojen to skrót od Twin Ion Engine Fighter) oraz Autonomiczny
Komputer Nawigacjny, bodaj najbardziej zaawansowany system
Sztucznej Inteligencji, jaki do tej pory powstał. Podczas lotu
przez pustkę kosmosu komputer pokładowy DS1 jest w stanie obejść
się całkowicie bez ingerencji człowieka. Sam wyznacza sobie
cele, sam planuje trasę przelotu, sam jest w stanie wyliczyć
wszystkie potrzebne korekty kursu. Ale to nie wszystko. Prawdziwa
rola komputera i oprogramowania nazwanego Remote Agent to
reagowanie na nieprzewidziane problemy. Komputer potrafi sam
diagnozować wszystkie systemy na pokładzie sondy i, w razie
potrzeby, usiłować naprawić lub obejść uszkodzenie. Podczas
prób urządzenia zasymulowano uszkodzenie instrumentów
badawczych aby sprawdzić jak komputer zareaguje. Po ustaleniu
miejsca uszkodzenia i kilku próbach przywrócenia instrumentów
do życia Remote Agent opracował nowy plan misji oraz nowy kurs
tak, by zrekompensować braki w wyposażeniu większą liczbą
pomiarów z innych instrumentów pokładowych. Może się to
wydawać mało skomplikowane, lecz w rzeczywistości wymaga
bardzo rozbudowanych systemów podejmowania decyzji, co jest
jednym z najtrudniejszych zagadnień informatyki. Równie cenne
dla rozwoju lotów kosmicznych są próby silników jonowych na
pokładzie DS1. Silniki te charakteryzują się bardzo małym ciągiem,
lecz są niezwykle oszczędne, co ma duże znaczenie przy bardzo
długich lotach. Sonda wyposażona w silniki jonowe rozpędza się
powoli, lecz przez dłuższy okres czasu może osiągnąć dużo
wyższe prędkości niż klasyczny napęd rakietowy na paliwo
ciekłe lub stałe. Urządzenia testowane na Deep Space 1 z pewnością
już niedługo staną się standartowym wyposażeniem statków
kosmicznych.
Wojen to skrót od Twin Ion Engine Fighter) oraz Autonomiczny
Komputer Nawigacjny, bodaj najbardziej zaawansowany system
Sztucznej Inteligencji, jaki do tej pory powstał. Podczas lotu
przez pustkę kosmosu komputer pokładowy DS1 jest w stanie obejść
się całkowicie bez ingerencji człowieka. Sam wyznacza sobie
cele, sam planuje trasę przelotu, sam jest w stanie wyliczyć
wszystkie potrzebne korekty kursu. Ale to nie wszystko. Prawdziwa
rola komputera i oprogramowania nazwanego Remote Agent to
reagowanie na nieprzewidziane problemy. Komputer potrafi sam
diagnozować wszystkie systemy na pokładzie sondy i, w razie
potrzeby, usiłować naprawić lub obejść uszkodzenie. Podczas
prób urządzenia zasymulowano uszkodzenie instrumentów
badawczych aby sprawdzić jak komputer zareaguje. Po ustaleniu
miejsca uszkodzenia i kilku próbach przywrócenia instrumentów
do życia Remote Agent opracował nowy plan misji oraz nowy kurs
tak, by zrekompensować braki w wyposażeniu większą liczbą
pomiarów z innych instrumentów pokładowych. Może się to
wydawać mało skomplikowane, lecz w rzeczywistości wymaga
bardzo rozbudowanych systemów podejmowania decyzji, co jest
jednym z najtrudniejszych zagadnień informatyki. Równie cenne
dla rozwoju lotów kosmicznych są próby silników jonowych na
pokładzie DS1. Silniki te charakteryzują się bardzo małym ciągiem,
lecz są niezwykle oszczędne, co ma duże znaczenie przy bardzo
długich lotach. Sonda wyposażona w silniki jonowe rozpędza się
powoli, lecz przez dłuższy okres czasu może osiągnąć dużo
wyższe prędkości niż klasyczny napęd rakietowy na paliwo
ciekłe lub stałe. Urządzenia testowane na Deep Space 1 z pewnością
już niedługo staną się standartowym wyposażeniem statków
kosmicznych.
http://nmp.jpl.nasa.gov/ds1
ROTON
Ten projekt ma szanse zrewolucjonizować loty kosmiczne. Do tej
pory każdy start rakiety nośnej wiązał się z olbrzymimi
kosztami. Głównym problemem był fakt iż rakiety były (i są)
jednorazowego użytku, co powyższa koszty całego przedsięwzięcia.
 Odpowiedzią inżynierów jest Roton, pierwsza rakieta
wielokrotnego użytku, która właśnie przechodzi wstępne testy.
Przy starcie Roton zachowuje się jak zwykła rakieta nośna. Po
dotarciu na orbitę stabilizuje lot, po czym wykonuje swoje
zadanie (maszyny tego typu wykorzystywane będą między innymi
do dostarczania zasobów niezbędnych do życia na orbitalne
stacje naukowe). Po wykonaniu zadania rakieta odpala silniki
korekcyjne, które obracają ją dyszami w kierunku Ziemi, po
czym kierują ją na tor lotu powrotnego na planetę. Po wejściu
w atmosferę Roton wysuwa śmigła których obrót wytwarza siłę
nośną potrzebną do zmniejszenia prędkości zejścia na Ziemię.
Możliwość wielokrotnego użycia czyni z Rotona rewelacyjny środek
transportu ludzi i sprzętu na orbitę okołoziemską. Bardzo ważną
innowacją jest pokładowa elektronika umieszczona na pokładzie
rakiety. Zarówno klasyczne rakiety nośne, jak i technika
stosowana przy startach promów kosmicznych, wymaga obecności
centrum sterowania lotów i setek ludzi na Ziemi, którzy czuwają
nad prawidłowym rozwojem wydarzeń. Większość komputerów
potrzebnych do obliczenia toru lotu i do wykonania manewrow
korekcyjnych mieści się właśnie w centrum kontroli. Nie muszę
chyba dodawać, jak bardzo podnosi to koszty wszelkich misji (dodatkowa
Odpowiedzią inżynierów jest Roton, pierwsza rakieta
wielokrotnego użytku, która właśnie przechodzi wstępne testy.
Przy starcie Roton zachowuje się jak zwykła rakieta nośna. Po
dotarciu na orbitę stabilizuje lot, po czym wykonuje swoje
zadanie (maszyny tego typu wykorzystywane będą między innymi
do dostarczania zasobów niezbędnych do życia na orbitalne
stacje naukowe). Po wykonaniu zadania rakieta odpala silniki
korekcyjne, które obracają ją dyszami w kierunku Ziemi, po
czym kierują ją na tor lotu powrotnego na planetę. Po wejściu
w atmosferę Roton wysuwa śmigła których obrót wytwarza siłę
nośną potrzebną do zmniejszenia prędkości zejścia na Ziemię.
Możliwość wielokrotnego użycia czyni z Rotona rewelacyjny środek
transportu ludzi i sprzętu na orbitę okołoziemską. Bardzo ważną
innowacją jest pokładowa elektronika umieszczona na pokładzie
rakiety. Zarówno klasyczne rakiety nośne, jak i technika
stosowana przy startach promów kosmicznych, wymaga obecności
centrum sterowania lotów i setek ludzi na Ziemi, którzy czuwają
nad prawidłowym rozwojem wydarzeń. Większość komputerów
potrzebnych do obliczenia toru lotu i do wykonania manewrow
korekcyjnych mieści się właśnie w centrum kontroli. Nie muszę
chyba dodawać, jak bardzo podnosi to koszty wszelkich misji (dodatkowa
 infrastruktura naziemna, wielka liczba osób zaangażowanych w
projekt). Otóż konstruktorzy Rotona postanowili umieścić
wszystkie te przyrządy, całą potrzebną elektronikę, na jego
pokładzie. Stało się to możliwe dzięki galopującemu postępowi
technik komputerowych. Te same maszyny, które na Cape Canaveral
zajmują kilka pięter, teraz mieszczą się w jednym małym
chipie. Roton ma na wyposażeniu całą potrzebną aparaturę,
dzięki czemu jest w stanie obejść się praktycznie bez
wsparcia z Ziemi. Prototyp rakiety rozpoczął pierwsze testy na
pustyni Mojave w Kaliforni kilka tygodni temu (na razie przelot
próbny bez wychodzenia poza atmosferę ziemską). Oblatywaczem
był dr Marti Sarigul-Klijn, szef inżynierów firmy Rotary
Rocket Company i doświadczony pilot marynarki. Zgodnie z planami
Roton będzie gotowy do pełnienia misji pod koniec 2001 roku.
infrastruktura naziemna, wielka liczba osób zaangażowanych w
projekt). Otóż konstruktorzy Rotona postanowili umieścić
wszystkie te przyrządy, całą potrzebną elektronikę, na jego
pokładzie. Stało się to możliwe dzięki galopującemu postępowi
technik komputerowych. Te same maszyny, które na Cape Canaveral
zajmują kilka pięter, teraz mieszczą się w jednym małym
chipie. Roton ma na wyposażeniu całą potrzebną aparaturę,
dzięki czemu jest w stanie obejść się praktycznie bez
wsparcia z Ziemi. Prototyp rakiety rozpoczął pierwsze testy na
pustyni Mojave w Kaliforni kilka tygodni temu (na razie przelot
próbny bez wychodzenia poza atmosferę ziemską). Oblatywaczem
był dr Marti Sarigul-Klijn, szef inżynierów firmy Rotary
Rocket Company i doświadczony pilot marynarki. Zgodnie z planami
Roton będzie gotowy do pełnienia misji pod koniec 2001 roku.
http://www.rotaryrocket.com
KALENDARIUM
1957 Pierwszy sztuczny satelita Ziemi (Sputnik 1)
1961 Pierwszy człowiek w przestrzeni kosmicznej (Wostok 1)
1965 Pierwszy spacer w przestrzeni kosmicznej (Woschod 2)
1966 Pierwsze zejście statku kosmicznego w atmosferę innej
planety (Wenera 3 - Wenus)
1969 Pierwsze lądowanie ludzi na powierzchni innego ciała
niebieskiego (Apollo 11 - Księżyc)
1976 Pierwsze pomyślne lądowanie na Marsie (Viking 1)
 1977 Pierwszy przelot koło Saturna (Pioneer 11)
1977 Pierwszy przelot koło Saturna (Pioneer 11)
1981 Pierwszy załogowy statek kosmiczny wielorazowego użytku
1986 Pierwsza stacja orbitalna z wymienną załogą (Mir)
1986 Pierwszy przelot koło Urana (Voyager 2)
1989 Pierwszy przelot koło Neptuna (Voyager 2)
1995 Galileo wchodzi na orbię wokół Jowisza
1997 Mars Global Surveyor wchodzi na orbitę wokół Marsa a
Pathfinder ląduje na jego powierzchni
1997 Start sondy Cassini
1998 Start sondy Deep Space 1
1999 Planowane lądowanie sondy Mars Polar Lander (3 grudnia)
Webmaster:
Piotr Moskal
Ogólne pytania proszę kierować pod adres mspolska@kki.net.pl
Copyright © The Mars
Society 1998

 1977 Pierwszy przelot koło Saturna (Pioneer 11)
1977 Pierwszy przelot koło Saturna (Pioneer 11)